

Suunto compass re attached to a custom leather strap.
Che-Wei Wang (last update 2013) Visit cwandt.com for the latest.
Suunto compass re attached to a custom leather strap.


The ankle support is a low profile sleeve around the foot and a strap at the heel to connect to the air muscle. A shorter 12″ muscle connects the ankle support to the calf. The calf attachment is now constructed out of a single piece of leather with nylon reinforcement at the top to prevent buckling and stretching when the air muscle is actuated. It’s ideal to have the solenoid valve as close to the air muscle as possible, so I’m going to have to make room for that somewhere on the calf.

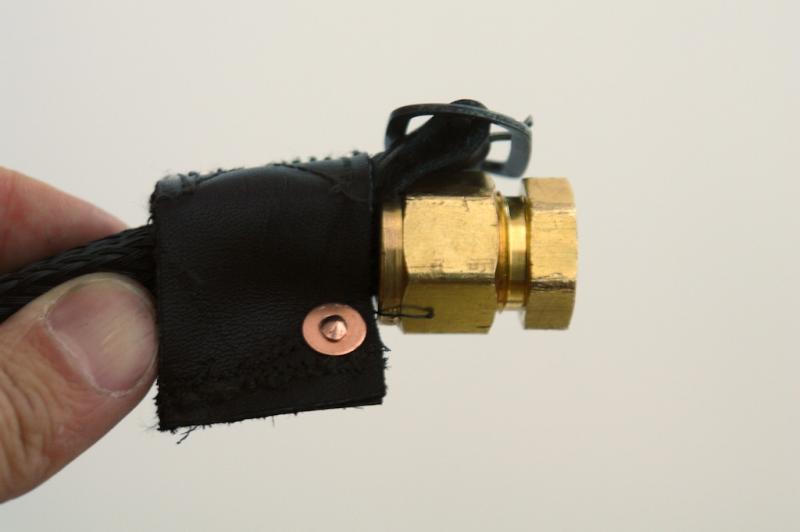

The most common point of failure in all the test have been the connection at the collar around each end of the air muscles. The inflation of the muscle along with the tension force rip through the threads around the collar, so I’ve reinforced those points with rivets with some room to expand.
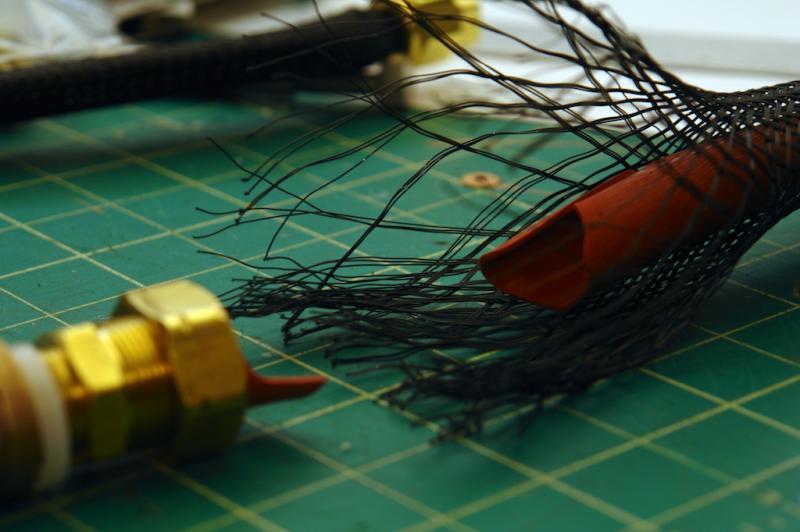
This is what happens when you pump compressed air directly into an air muscle without a pressure regulator. Good thing I wasn’t wearing it when it exploded.






After the first round of testing, I realized assisting jumping with pneumatics is nearly impossible. The size of the tubes and tank necessary to get a high enough cfm to actuate the air muscles at the speed of jumping seems too large for a lightweight wearable application. So, I’m going to concentrate on assisting walking. Maybe speed walking.
Soft Exoskeleton V01 Test from che-wei wang on Vimeo.
 \
\
I finally have a full assembly of all the major components sewn with thick canvas and leather. The small scuba tank provides the air pressure, controlled by an Arduino and solenoid valves. The basic operation of pneumatic muscle works. Air pressure at about 100psi inflates the muscle, creating a contracting motion of about 2 inches, enough to make my leg kick out (although the speed of inflation needs to be faster).
The harness for the scuba tank and a guide for the pneumatic muscle are still issues to be dealt with. The strap for the thigh needs to extend further down to help guide the placement of the pneumatic muscle and the scuba tank needs to be attached in a more comfortable way.

I finally got the solenoid valve hooked up to an air compressor and and arduino board. Air pressure is regulated at 100 psi. It looks like I’m going to need bigger pipes to get more cfm for faster muscle actuation. The shorter muscle has an over sized braided sleeve, which I thought might help the actuation distance, but it seems like it just takes more air to fill up and doesn’t make a noticeable difference.
Pneumatic Muscle: Solenoid Valve Test 02 from che-wei wang on Vimeo.

The first set of home brew pneumatic muscles actually work. There’s no leakage and it looks like it holds well over 60 psi. The tiny air reservoir barely holds enough air for 2 actuations, so it looks likes a small scuba tank or a tiny air compressor is going to be needed. Weight tests coming soon.
Pneumatic Muscle : Pressure Test from che-wei wang on Vimeo.

Here’s my first set homebrew pneumatic muscles. I’m not sure how strong these are going to be, but it looks promising. The compression fittings aren’t being used the way they were meant to be used, so it’s likely that connection will be the first point of failure when it goes under stress.
As soon as the assembly is tested, I’ll be posting instructions on how to make your own.
Pneumatic systems are clean, safe, lightweight, and reliable. In a pneumatic electronic hybrid system, electric components simply control the flow of air pressure, removing the burden of weight and kinetic actuation from electrical power to pneumatic power. The advantage is a lightweight low idle power system with high power kinetic impact.
My initial encounter with pneumatic systems like inflatable shelters and floatation devices exhibited an enormous potential for creating lightweight systems that can be reconfigurable and transportable. Pneumatic systems are used in various critical applications that require immediate response, reliability and flexibility. Air bag systems, inflatable life vests, and self-inflating rafts are of particular interest to me.
In terms of pneumatic systems as a wearable technology, a few possibilities come to mind (nomadic shelters, impact protection, an expressive suit, and a powered exoskeleton, just to name a few). Each have potential uses that interest me and many have been explored by others. Motoair sells pneumatically actuated vests and jackets for motorcyclists and other high impact sports to cushion accidents. ((Motoair, MOTOAIR, Jan 28.2008, <http://www.motoair.com/>)) Powered exoskeletons, currently developed within research groups around the world, are focused on assisting human locomotion through a wearable machine. ((exoskeletons: http://bleex.me.berkeley.edu/index.htm, http://www.newscientist.com/article.ns?id=dn1072, http://spectrum.ieee.org/print/1974, http://www.youtube.com/watch?v=0hkCcoenLW4)) Actuated parts of the machine coincide with the body and gross muscle groups to help lift heavy loads. A suit for the upper extremities has been created by Hiroshi Kobayashi, a roboticist from the Science University of Tokyo. ((BBC. BBC News: Health, Jan. 28 2008 <http://news.bbc.co.uk/1/hi/health/2002225.stm>)) Dr. Daniel Ferris and Dr. Riann Palmieri-Smith lead a group of researchers at the University of Michigan in creating pneumatically powered exoskeletons for the lower limbs. ((Human Neuromechanics Laboratory, Dr. Daniel Ferris and
Dr. Riann Palmieri-Smith. Jan. 28,2008.
Features of the wearable system
The system will be powered by a pneumatic reservoir and triggered by the user’s motions or an external switch to activate the system only at desired moments. An electronic circuit, powered by a battery will sense and trigger movement through a series of artificial muscles. Pneumatic muscles work by inflating a silicon tube within a plastic braided sleeve. The inflation of the tube shortens the overall length of the assembly as the braided sleeve increases radially. ((Lightner, Stan, et al. The International Journal of Modern Engineering. Volume 2, Number 2, Spring 2002, Jan.28 2008 <http://www.ijme.us/issues/spring%202002/articles/fluid%20muscle.dco.htm>))
Pneumatic muscles are a relatively recent development in air powered actuation, lead by the Shadow Robot Company, and FESTO Corporation. They were originally commercialized by The Bridgestone Rubber Company in the 1980’s. ((Lightner, Stan, et al. The International Journal of Modern Engineering. Volume 2, Number 2, Spring 2002, Jan.28 2008 <http://www.ijme.us/issues/spring%202002/articles/fluid%20muscle.dco.htm>
Air Muscle videos:
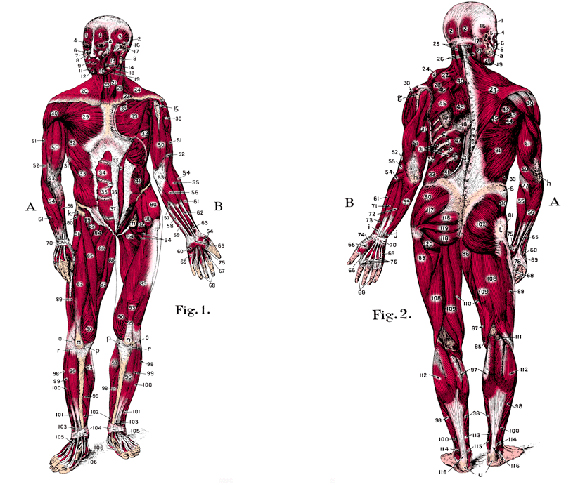
The Pneumatic Soft Exoskeleton is worn by strapping components of of the system on parts of the leg to align the assistive muscle to major muscle groups in the leg. By attaching a few pneumatic muscles to assist gross movement of the lower extremities, properly timed actuation of the assisting muscles can add to the user’s own movements to achieve greater results in speed and power. Each assistive muscle would coincide with existing muscle groups and transfer power to tension lines that wrap around the leg in such a way that the forces transfer in a similar fashion to the muscle-tendon-bone hierarchy. The quadriceps femoris muscle group will be the primary group of focus. As the system is perfected, other muscle groups will be identified and addressed.
Components of the system
The system consists of pneumatic muscles of varying sizes which attach to the main wearable frame. The wearable frame is a large fabric that is wrapped tightly around the thigh and crus. The frame consists of straps that are sewn in a pattern to distribute forces from muscle-to-tendon junctures to the rest of the frame. The straps are collected at several junctures to accept a tension connection from a pneumatic muscle.
Air flow of each pneumatic muscle is controlled by a single tube from a 3-way solenoid valve which controls the air flow in and out of the pneumatic muscle from a portable air reservoir worn at the hip of the user. Each solenoid is controlled by outputs from a battery powered Arduino board. Switches from the user’s inputs are fed to the Arduino board to control the actuation of the artificial muscles.
Uses
Potential uses for the Pneumatic Soft Exoskeleton follow much of the current applications for powered exoskeletons. These wearable machines can assist lifting and locomotion. The added benefit of the Pneumatic Soft Exoskeleton is its weight and flexibility. By making the system lightweight and soft, its appearance is less obtrusive and less of a burden to fit to the body. The system is potentially more affordable and highly customizable because of the simplicity of the components.
Technical concerns
The Pneumatic Soft Exoskeleton must be lightweight and perform reliably to assist locomotion. Since the system relies on an air reservoir, it is likely that a user may find the system insufficient in its capacity to perform continuously. This concern can be address with a larger reservoir, but that would add more undesirable weight and volume.
There may be a potentially harmful side-effect to the body due to repeated unfamiliar stress on bones and muscles. The softness of the system is intended to dampen any impact that may be harmful, but repeated stress points due to the power of the assistive muscle or the location and transfer of forces to the limbs may be damaging.
Precedents
Here’s a nice intro to the subject from engineeringtv.com
Human Neuromechanics Laboratory at The University of Michigan
HAL at the University of Tsukuba
Muscle Suits at Koba Lab
Wearable Power Assist Suit at Kanagawa Institute of Technology, Robotics and Mechatronics


The hands free umbrella was designed in collaboration with Dinesh Vader, the patent holder for the device. The design focused on ease of use, comfort and portability. Materials were chosen to make an attractive soft shell sling while keeping manufacturing costs low.



