Some clocks are functional, some are not very practical. This is an ongoing series of clock experiments.
Each clock is written in Processing and presented here using processing.js.
link: [time 00]
Che-Wei Wang (last update 2013) Visit cwandt.com for the latest.
Some clocks are functional, some are not very practical. This is an ongoing series of clock experiments.
Each clock is written in Processing and presented here using processing.js.
link: [time 00]
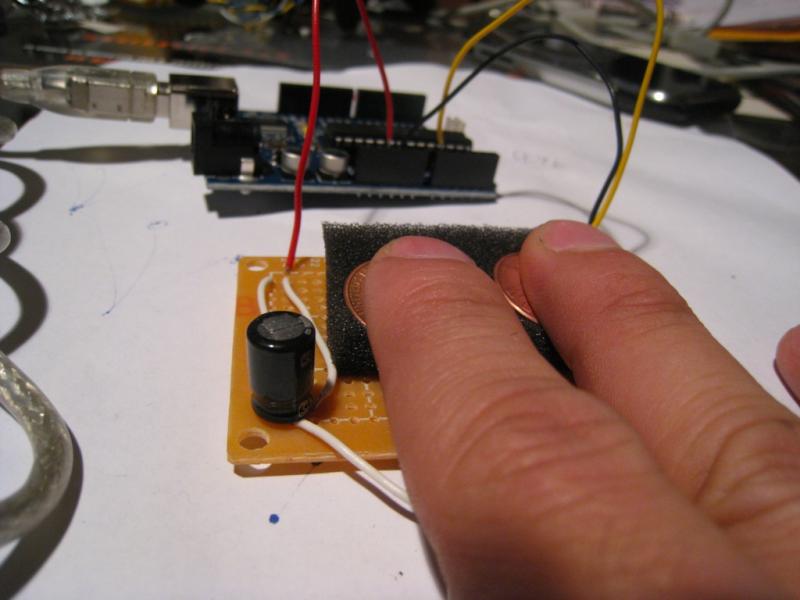
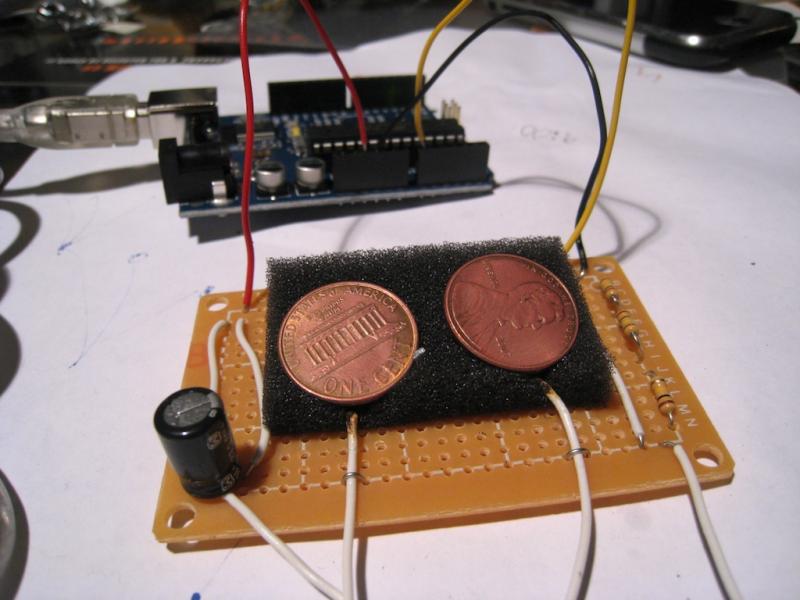
Galvanic skin response readings are simply the measurement of electrical resistance through the body. Two leads are attached to two fingertips. One lead sends current while the other measures the difference. This setup measures GSR every 50 milliseconds. Each reading is graphed, while peaks are highlighted and an average is calculated to smooth out the values. A baseline reading is taken for 10 seconds if the readings go flat (fingers removed from leads).
Here’s a some code for Processing to import csv files and parse the entries into a 2D array.
I wanted to use the mouse as a simple surface optical encoder to get infinite panning motion. The problem with reading mouse coordinates on the screen, is that once the mouse reaches the edge of the screen, it stops counting. So a simple solution is to reposition the mouse (using the robot class) every few frames and calculate the change in mouse positions.
//InfiniteMouseTracking
//by Che-Wei Wang
//2.20.2008
float mapPositionX;
float mapPositionY;
long count=0;
int moveX=0;
int moveY=0;
void setup()
{
size(screen.width,screen.height,P3D);
mapPositionX=width/2;
mapPositionY=height/2;
//noCursor();
//set the mouse postion once before the program begins
try {
Robot robot = new Robot();
robot.mouseMove(width/2, height/2);
}
catch (AWTException e) {
}
}
void draw()
{
background(0);
//reset the cursor Position every few frames
if(count%4==0){
try {
Robot robot = new Robot();
robot.mouseMove(width/2, height/2);
}
catch (AWTException e) {
}
moveX=mouseX-pmouseX;
moveY=mouseY-pmouseY;
}
count++;
//new position= old position + movement * decay
mapPositionX=mapPositionX+moveX*.8;
mapPositionY=mapPositionY+moveY*.8;
stroke(255);
line(width/2,height/2,mapPositionX,mapPositionY);
ellipse(mapPositionX,mapPositionY,100,100);
}
.dxf and 3D point position .txt file output and sunflow rendering example
An example sketch using the Ess library to make a class of objects jiggle in response to the microphone input
An example of blobDetection, Ess, sms, and ocd all rolled into one sketch. Click and drag on the screen to move the HUD sliders around. (nothing is going to load here. copy the code to your processing sketch to run it)
Slightly updated code for incorporating vibe control via serial.
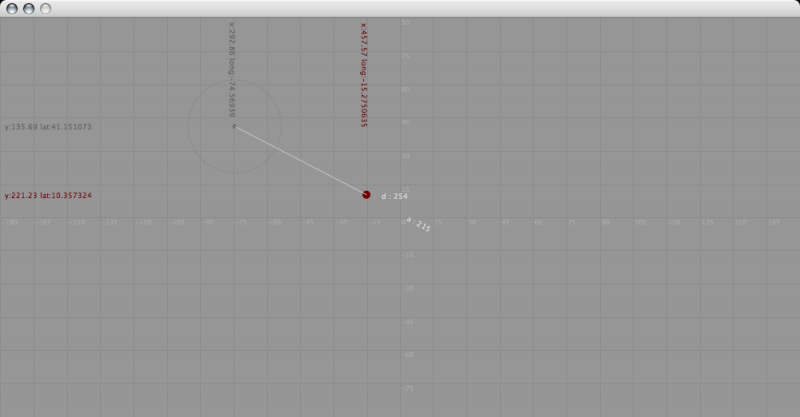
Here’s our Processing sketch for taking a live GPS feed of some guy in Kansas that never seems to move. The applet displays his location, our fixed location and controls MoMo, our haptic navigation device via serial connection.
[HND: Live GPS]