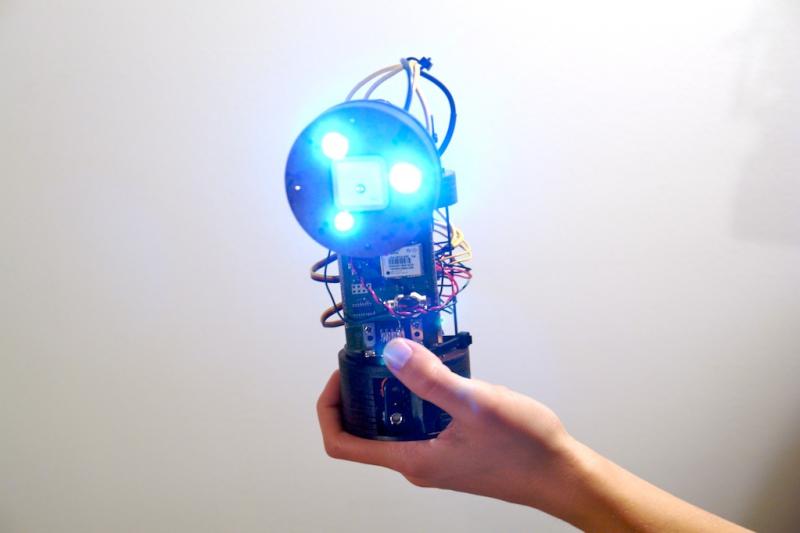
The Laser Tether is a hand held laser pointer that perpetually points at its sibling. Two Laser Tethers constantly point at each other no matter where they are on the globe. If my cousin in Beijing had a Laser Tether and I turned on mine in New York City, our lasers would point towards our feet as the lasers draw a straight line through Earth between my cousin and myself.
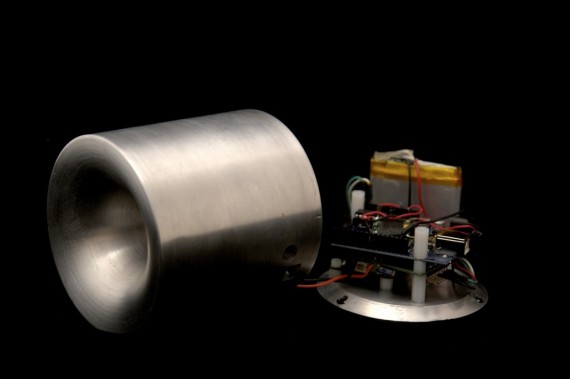
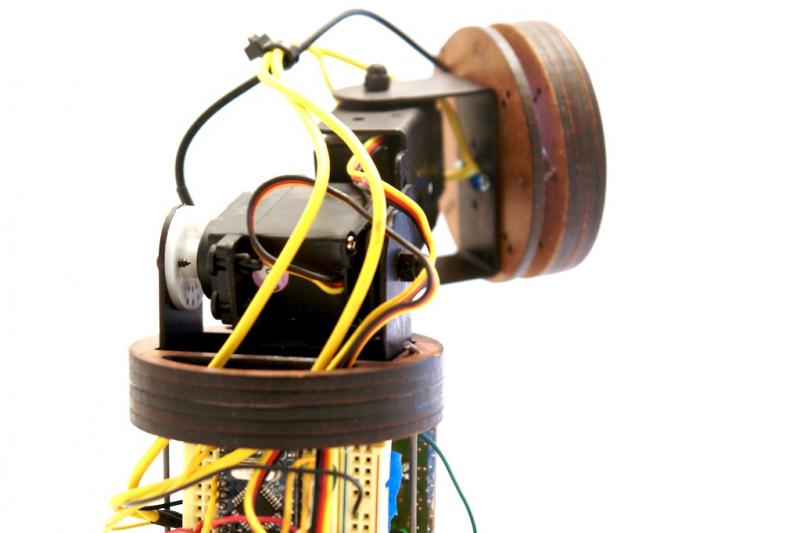
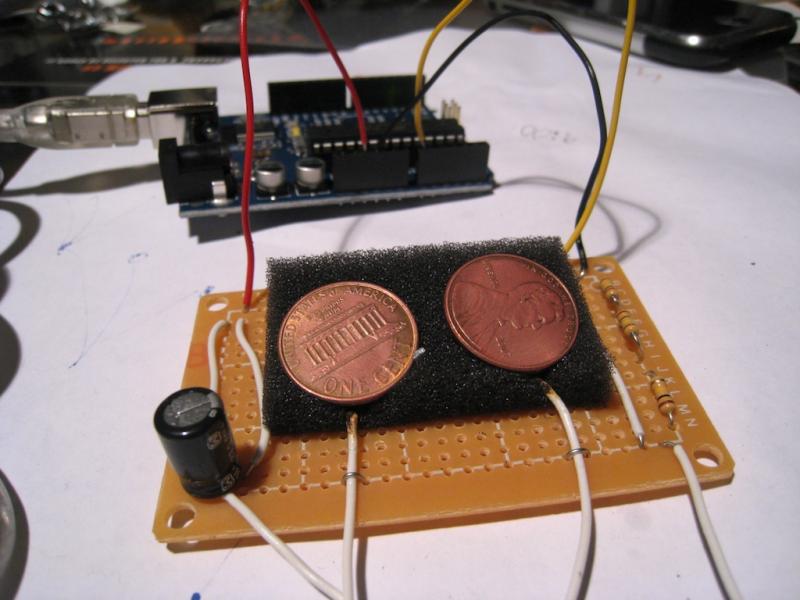
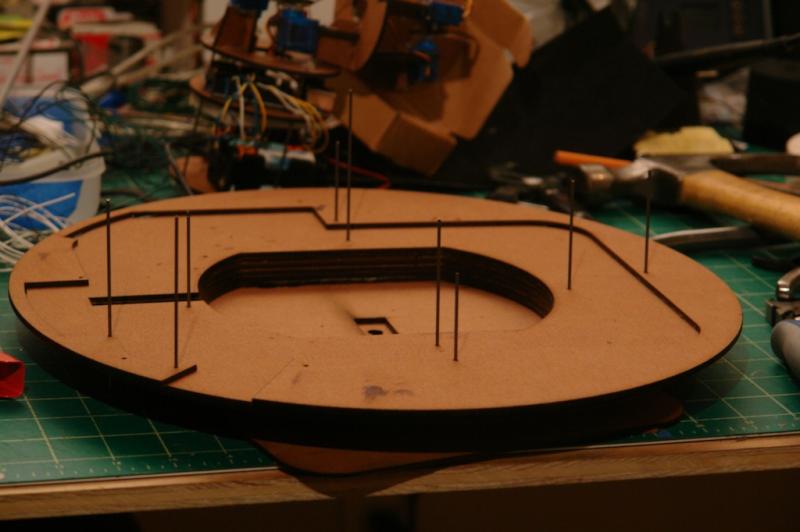
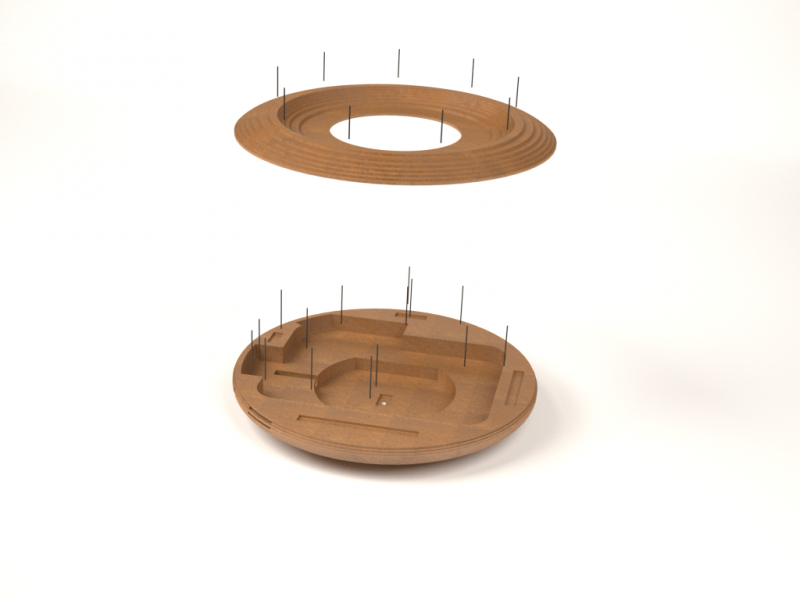
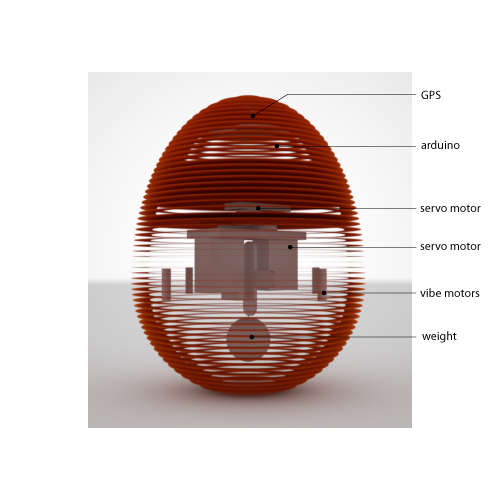
The devices are each equipped with a GPS module, a digital compass, and a cell network module to locate, orient, and upload its location to an online database. They then calculate the proper alignment of their lasers in relation to the other. In order to maintain an orientation that is always perpendicular to the ground, the lasers are mounted on a self leveling mechanism similar to existing laser levels like the DEWALT DW077KI.
Possible uses for the devices are for loving spouses, cheating spouses, girlfriends, boyfriends, children, pets, bags of money, packages, and pretty much anything that you would want to locate at a glance. Although potential uses are many, the scenarios I have in mind are for hiking, sailing, driving, caravaning, patrolling, playing tag, jogging, getting lost in crowds, hunting, tracking, spying, and battle strategy coordination. An ideal usage of the Laser Tether would be in a situation where two people need to wander, but also need to locate one another in an instant.
With GPS units becoming more pervasive, many GPS tracking applications have databases of people’s known locations. The emerging debate on privacy and accuracy are a major concern ((Katina Michael, Andrew McNamee, MG Michael, “The Emerging Ethics of Humancentric GPS Tracking and Monitoring,” icmb, p. 34, International Conference on Mobile Business (ICMB’06), 2006)), while the abstract representation GPS data in maps fail to convey a strong sense of immediacy and relevance. These applications like Navizon and Mologogo are open to large online communities and are visualized on maps. Common commercial applications of GPS tracking devices are used for fleet control of taxis and trucks, animal control, race tracking, and visualization. ((GPS tracking. (2008, January 27). In Wikipedia, The Free Encyclopedia. Retrieved 04:39, January 30, 2008, from http://en.wikipedia.org/w/index.php?title=GPS_tracking&oldid=187351992))
The Laser Tether attempts to make one’s relation to a distant person more immediate. The difference is like looking at a map to see where your uncle lives versus having a string attached to him.